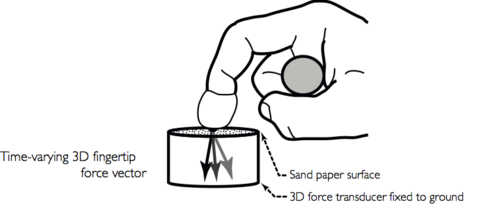
Using our fingers, we routinely touch, press and interact with external surfaces. These interactions couple the dynamics of the finger to the object or surface being touched, and creates challenging problems for control of robotic grasping. However, the strategies that humans use in fingertip contact control was unknown prior to our studies. Using fine-wire electromyograms from all seven muscles of the index finger and biomechanical modeling, we showed that when transitioning between motion and force (finger tapping) humans precisely anticipate fingertip collisions. The torques at the finger joints rapidly switch from motion to force control just in time (< 60ms) for contact. Then using optimal control we showed that elasticity of the long tendons of the fingers, the time constant for neural excitation of muscle and frictional constraints at the fingertip are the primary mechanical and neuromuscular factors that govern the observed strategy. Our investigations into contact control by humans drives my current work on muscle mechanics, and a broader theory for systematic actuator and mechanical design.
Ongoing projects include:
- Actuator design for open-loop stable contacts.
- Reformulation of open-loop stable strategies as an LMI.